
马提亚斯·托马合著
每天,消费者都在与系统交互,这些系统能够评估他们周围的环境,并据此采取行动。在汽车中,当踩下油门时,车辆几乎瞬间加速——从踩下踏板到加速之间没有明显的延迟。
将这个例子应用到本文的主题中,如果车辆是一个系统,周围环境按下加速器并输出车辆速度,那么系统就实现了所谓的“实时控制”。实时控制是指闭环系统在规定的时间窗口内收集数据、处理数据并更新系统的能力。如果系统错过了定义的窗口,其稳定性、精度和效率将会降低。减弱的控制可能不利于系统性能;例如,没有达到必要的速度,甚至过热。在本文中,我将解释实时控制系统的功能块,并提供一个机器人应用程序示例。
与其他系统组件的通信虽然不一定涉及系统的控制,但也应该与主控制回路共存。实时控制涉及的主要功能块是传感(收集数据)、控制(解释和使用数据)和驱动(更新系统)(图1)。

图1:实时控制回路的主要功能块
让我们更详细地看看这些组件。
- 传感是指对电压、电流、电机转速或温度等外部因素的测量。这些关键参数需要精确和精确的测量,以便为系统提供在特定时间点发生的可靠数据。
- 中央处理单元对输入数据应用控制技术,以便计算下一个输出命令。微控制器(mcu)或控制器等C2000
 思达拉集成无刷直流电动机驱动而且直流/直流控制器含有高处理功能可以帮助确保系统满足最小的时间窗口—通常在微秒到几毫秒之间。
思达拉集成无刷直流电动机驱动而且直流/直流控制器含有高处理功能可以帮助确保系统满足最小的时间窗口—通常在微秒到几毫秒之间。 - 驱动是将计算输出命令应用到系统中,以控制输出。改变驱动电力电子系统的脉宽调制器(PWM)单元的占空比就是驱动的一个例子。TI公司帮助增强驱动的产品包括模拟驱动器、隔离门驱动器而且集成栅极驱动器的氮化镓(GaN)场效应晶体管.
- 最后,实现了确定性高速通信接口,如快速串行接口或以太网沟通系统与外部设备或内部部件之间的连接。
例如,在机器人技术中,实时控制精确地控制电机的位置和速度,以<100-µm的精度定位机械臂。通过不断测量电机电流和电压以及电机位置,这种精度是可能的。处理单元将实测值与计算值进行比较,如图2所示。根据结果,处理单元将PWM信号调整到电机。整个过程需要在几微秒内完成,以满足系统的准确性和定时需求。
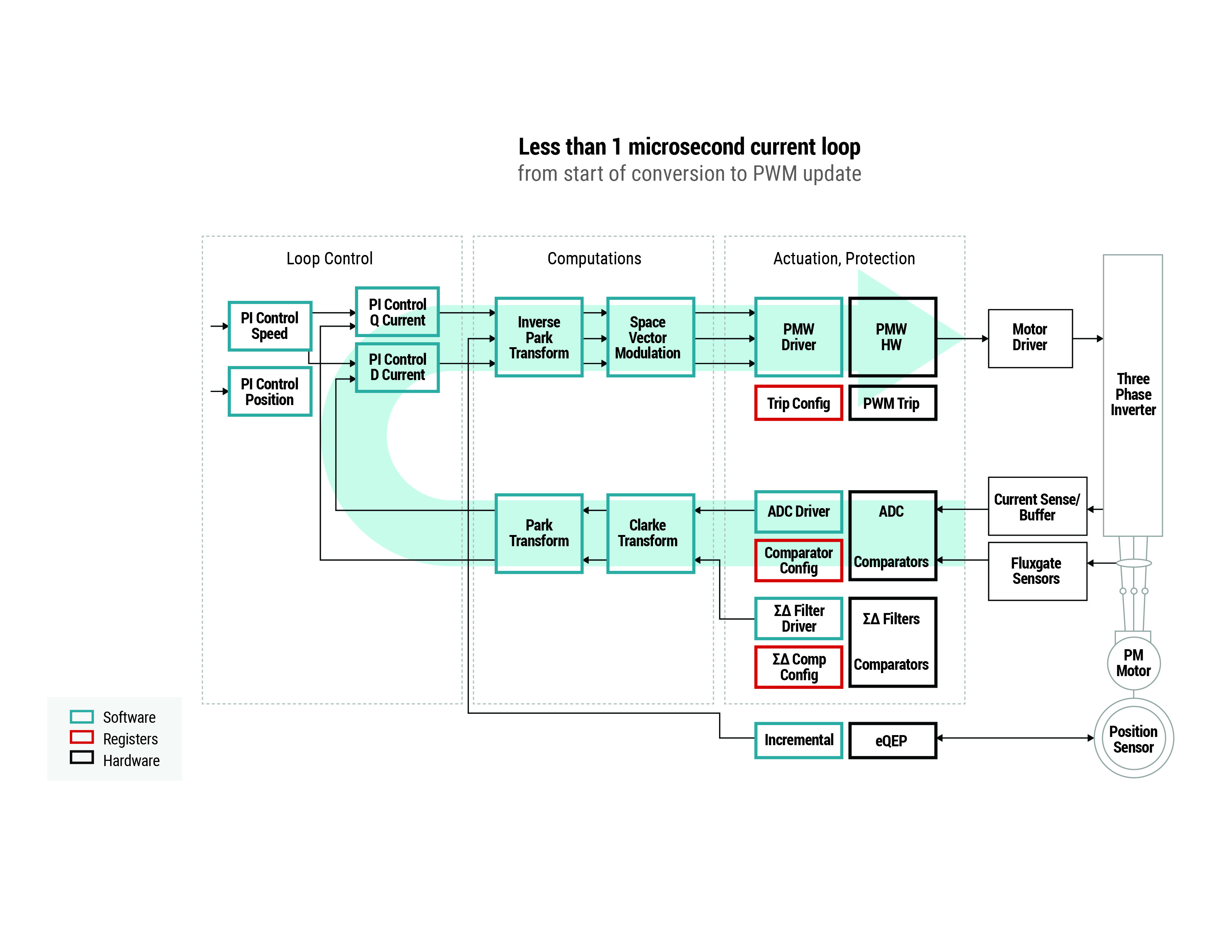
图2:快电流回路图
实时控制也是高效可靠供电系统的基础。例如,实时控制有助于保持充电站的输出功率稳定,并调节进入汽车电池的电流,以维持其寿命并避免过热。将实时控制与单片机和新技术相结合,如氮化镓可以提高功率密度和效率,帮助最大限度地减少应用程序中的功率损失。
现代电机驱动系统性能的不断提高也相应地提高了对实时控制的要求。例如,高度快速和精确的计算机数控机床(控制各种复杂机械的机器,如磨床和车削机)可以在每分钟旋转超过20,000次的情况下实现<5微米的精度。这种功能只能通过极快的控制回路实现,这意味着信号测量和系统调整之间的时间延迟通常在<1µs内实现。
由于对时间高度敏感的计算负担,许多设计人员使用现场可编程门阵列、快速外部模数转换器和多个mcu的组合。但是TI的C2000 mcu和Sitara处理器提供了更高级别的模拟集成,使它们能够在<1µs内执行电流循环,这被称为快速电流循环.利用现代控制拓扑中的快电流环路,使设计人员能够以更低的成本开发更小、性能更高的系统。
通过使用完全集成的解决方案,如TI的解决方案,也有可能进一步降低成本MCF8316汽车司机。这种设备预先编程了无刷直流电动机控制算法,只需要微调,通过一个简单的I2在系统设计阶段,采用单片机C接口配置集成电可擦可编程只读存储器。它们还带有硬件配置,使系统设计人员能够在没有MCU的情况下调整电机。MCF8316集成了6个金属氧化物半导体场效应晶体管,将电流传递到电机,从而在7毫米× 5毫米的封装中实现了完整的实时电机控制解决方案。
实时控制是电网基础设施、家电、电动和混合动力汽车、电力输送、电机驱动和机器人等应用领域的重要组成部分。为了实现更快的响应时间,越来越需要满足所有这些应用程序更小的执行窗口。TI完整的传感、处理、控制和通信技术组合提供电源效率、性能和低延迟响应时间,实现更小、更可靠的实时控制系统。
要了解更多关于实时控制的传感功能块的信息,请阅读本系列的下一篇文章。实时控制系统中传感器优化数据可靠性的3个技巧。"
额外的资源
- 请参阅申请说明。”使用C2000实时微控制器开发的基本指南”。
- 读白皮书吧。”用于工业自动化的时间敏感网络”。
- 回顾“实时控制参考指南”。
- 阅读这篇文章。”mcu如何释放电气化设计的全部潜力”。
- 请查看在单MCU上采用快电流环(FCL)和SFRA的双轴电机驱动参考设计.
上面的评论
新项目很难考虑TI,因为我们在市场上找不到组件,尤其是TI ARM微控制器。请继续关注,伙计们!